
Система координат – это математический инструмент, который используется в физике для описания положения и движения объектов. Существует несколько различных систем координат, каждая из которых имеет свои особенности и применяется в определенных областях физики.
Одной из наиболее распространенных систем координат является прямоугольная система. В этой системе пространство разбивается на три взаимно перпендикулярные оси: ось X, ось Y и ось Z. Оси X и Y располагаются в плоскости, а ось Z – перпендикулярно этой плоскости. Такая система координат удобна для описания движения тела в трехмерном пространстве.
Круговая система координат – это система, которая состоит из радиуса и угла. Радиус указывает на расстояние от центра системы координат до объекта, а угол – на направление от центра к объекту. Эта система применяется в физике для описания полярных координат и круговых гармонических функций.
Цилиндрическая система координат объединяет прямоугольную и круговую системы координат. В этой системе пространство разбивается на ось Z, радиус и угол. Высота объекта указывается осью Z, расстояние до объекта от центра системы координат – радиусом, а угол – направление от центра к объекту. Эта система координат активно применяется в механике и электродинамике.
- Виды и особенности систем координат в физике
- Абсолютные системы координат
- Декартова система координат
- Полярная система координат в физике
- Сферическая система координат
- Относительные системы координат
- Цилиндрическая система координат
- Эллиптическая система координат
- 10. — Тороидальная система координат
- 💥 Видео
Видео:Модель декартовой системы координат.Скачать

Виды и особенности систем координат в физике
Системы координат в физике играют важную роль в описании пространственных объектов и явлений. Они позволяют определить положение объекта в пространстве, их взаимное расположение, направление движения и другие характеристики.
Существует несколько видов систем координат, каждый из которых имеет свои особенности и предназначение для определенных задач.
1. Абсолютные системы координат. Данный вид систем координат используется для описания положения объектов в пространстве относительно некоторых фиксированных точек или осей. Одним из примеров абсолютной системы координат является декартова система координат.
— Декартова система координат. Это наиболее распространенная и простая система координат, которая используется во многих областях физики. Она состоит из трех взаимно перпендикулярных осей: оси X, оси Y и оси Z. Каждая ось имеет направление и точно определенное начало. Положение точки в декартовой системе координат задается значениями координат по осям X, Y и Z.
— Полярная система координат. Эта система координат используется для описания положения точек на плоскости или в пространстве с помощью радиуса и угла. В полярной системе координат ось начинается в положительном направлении радиуса, а угол измеряется относительно этой оси. Такая система координат удобна для описания кругового движения или сферической симметрии.
— Сферическая система координат. Это трехмерная система координат, которая используется для описания положения точек на поверхности сферы или в пространстве. В сферической системе координат используется радиус, угол между осью Z и радиус-вектором, а также угол между радиус-вектором и плоскостью XY.
2. Относительные системы координат. Данный вид систем координат используется для описания положения и движения объектов относительно других объектов или систем координат.
— Цилиндрическая система координат. В цилиндрической системе координат используется радиус, угол и высота. Она особенно удобна для описания вращательного движения или цилиндрической симметрии.
— Эллиптическая система координат. Эта система координат используется для описания эллиптической симметрии или движения объектов по эллиптической траектории. В эллиптической системе координат используются большая и малая полуоси эллипса, угол и аргумент перицентра.
— Тороидальная система координат. Это трехмерная система координат, которая используется для описания положения и движения объектов на поверхности тора. В тороидальной системе координат используются два угла и радиус.
Важно помнить, что выбор системы координат зависит от задачи, которую нужно решить, и удобства использования в конкретной физической ситуации.
Видео:Системы координат, применяемые в геодезииСкачать

Абсолютные системы координат
Наиболее распространенными абсолютными системами координат являются:
Декартова система координат — это прямоугольная система координат, в которой пространство разбивается на три взаимно перпендикулярных оси: ось X, ось Y и ось Z. В этой системе координат позиция точки определяется тремя числами — координатами по осям X, Y и Z.
Полярная система координат — это система координат, в которой плоскость разбивается на две взаимно перпендикулярные оси: радиус (от центра до точки) и угол (относительно фиксированной оси). Позиция точки в этой системе координат задается двумя числами — радиусом и углом.
Сферическая система координат — это система координат, в которой пространство разбивается на три взаимно перпендикулярных оси: радиус (от начала координат до точки), угол азимута (относительно фиксированной оси X) и угол места (от оси Z до точки). Позиция точки в этой системе координат задается тремя числами — радиусом, углом азимута и углом места.
Абсолютные системы координат широко используются в физике и других науках, где точная и неподвижная система координат необходима для определения позиции и движения объектов.
Декартова система координат
Координатная плоскость xOy называется горизонтальной плоскостью, а плоскость xOz и yOz – вертикальными плоскостями. В декартовой системе координат всякой точке пространства может быть сопоставлен уникальный набор чисел (x, y, z). Координаты x, y и z могут быть положительными, отрицательными или равными нулю, в зависимости от того, в какой части координатной плоскости находится точка.
Декартова система координат широко используется в физике, математике и инженерии для описания положения и движения объектов. Она обладает простой и интуитивно понятной структурой, что делает ее удобной для решения различных задач, связанных с изучением физических явлений.
Преимущества Декартовой системы координат:
- Простота использования и понимания;
- Однозначное задание положения объекта в пространстве;
- Удобство алгоритмической обработки и решения задач;
- Возможность применения математических операций для решения физических задач, таких как нахождение расстояния между точками, определение углов и т.д.
Применение Декартовой системы координат может включать:
- Описание положения и траектории движения тел;
- Анализ сил и векторов в пространстве;
- Работу с графиками и диаграммами;
- Моделирование объектов и систем;
- Описания физических величин и их взаимодействия.
Полярная система координат в физике
В полярной системе координат точка задается двумя величинами: радиусом-вектором r и полярным углом θ. Радиус-вектор r определяет расстояние от начала координат до точки, а полярный угол θ определяет направление радиус-вектора относительно положительного направления оси x.
Полярный угол θ измеряется в радианах и обычно изменяется в диапазоне от 0 до 2π (или от 0 до 360 градусов). Начало отсчета угла обычно выбирается на положительной полуоси x.
Векторное представление точки в полярной системе координат можно записать как P(r,θ), где r — радиус-вектор, а θ — полярный угол. Таким образом, для однозначного задания положения точки необходимо знать значения обеих величин.
Важно отметить, что в полярной системе координат одна и та же точка может быть представлена несколькими способами, так как полярный угол цикличен. Например, точка с радиусом-вектором r и углом θ может быть представлена также точкой с радиусом-вектором r и углом θ + 2πn, где n — целое число.
Полярная система координат широко применяется в различных областях физики, таких как механика, электродинамика, астрономия и другие. Она позволяет удобно описывать положения и движения тел в радиус-угловом представлении.
Сферическая система координат
Радиус-вектор (r) представляет собой расстояние от начала координат (полюса) до точки. Он может быть положительным значениям и определяет удаленность точки от полюса системы координат.
Полярный угол (θ) является углом между радиус-вектором и положительным направлением оси z системы координат. Он может принимать значения от 0 до 180 градусов.
Азимутальный угол (φ) является углом между положительным направлением оси x системы координат и проекцией радиус-вектора на плоскость xy. Он может изменяться в диапазоне от 0 до 360 градусов.
Сферическая система координат особенно полезна в задачах, связанных с описанием сферических тел или объектов, симметричных относительно оси z. К примеру, она может использоваться для описания движения планет вокруг Солнца или электронов в атомах.
Переход от прямоугольных координат (x, y, z) к сферическим координатам (r, θ, φ) осуществляется следующими формулами:
x = r * sin(θ) * cos(φ)
y = r * sin(θ) * sin(φ)
z = r * cos(θ)
Обратный переход от сферических координат к прямоугольным координатам осуществляется с помощью обратных формул.
Сферическая система координат обладает рядом преимуществ, таких как естественное описание сферической симметрии и удобство в решении определенных задач физического характера.
Видео:Владимир Сурдин: "Основные системы координат" (Урок 17)Скачать
Относительные системы координат
Одним из примеров относительных систем координат является цилиндрическая система координат. В этой системе координат объект описывается с использованием радиуса относительно оси Z, угла относительно оси X и высоты относительно оси Y. Эта система координат широко применяется в физике, например, при описании движения частиц в цилиндрических симметричных системах, таких как электронные оболочки атомов или торы.
Еще одним примером относительной системы координат является эллиптическая система координат. В этой системе координат объект описывается с использованием двух полуосей эллипса и угла относительно оси X. Эта система координат широко используется при описании орбит планет и спутников.
Также существует тороидальная система координат, в которой объект описывается с использованием радиуса тора, угла относительно оси X и угла относительно оси Y. Эта система координат применяется при изучении тороидальных структур, таких как плазменные оболочки в ядерных реакторах или устройствах с однонаправленным магнитным полем.
Цилиндрическая система координат
Основные особенности цилиндрической системы координат:
- Ось: Ось цилиндрической системы координат совпадает с вертикальной осью трехмерного пространства.
- Расстояние до оси: Этот параметр обозначается буквой r и измеряется величиной радиуса. Оно определяет, на каком расстоянии от оси находится точка.
- Угол: Угол между осью и радиус-вектором обозначается буквой φ и измеряется в радианах. Он показывает направление точки относительно оси. Угол равен нулю, когда радиус-вектор совпадает с положительным направлением оси x.
- Высота: Высота точки над плоскостью, содержащей ось, обозначается буквой z. Она измеряется величиной длины и показывает, насколько точка поднята или опущена относительно плоскости оси.
Цилиндрическая система координат удобна в решении задач, в которых важно описать положение точки относительно вертикальной оси, вращения и высоты. Она широко используется в механике, электромагнетизме, гидродинамике и других областях физики. Знание этой системы координат позволяет более точно и удобно описывать и анализировать различные физические явления и процессы.
Эллиптическая система координат
Большая полуось (a) определяет расстояние от начала координат до точки на эллипсоиде, а малая полуось (b) определяет расстояние от начала координат до точки на эллипсоиде в направлении, перпендикулярном большей полуоси.
В эллиптической системе координат пространство делится на четверть эллипсоидов с разными значениями большой и малой полуосей. Каждая четверть эллипсоида характеризуется своими значениями большой и малой полуосей.
Эллиптическая система координат находит применение в различных областях науки и техники, таких как астрономия, геодезия и навигация. Она используется для описания положения спутников, а также для решения задач, связанных с определением расстояний и ориентации в трехмерном пространстве.
Преимущества эллиптической системы координат:
- Позволяет более точно описывать форму эллипсоидов и их положение в пространстве.
- Облегчает решение задач, связанных с определением положения объектов на поверхности эллипсоидов.
- Используется в широком спектре научных и технических областей.
Использование эллиптической системы координат позволяет получать более точные и удобные результаты в решении задач, связанных с описанием и измерением положения объектов в трехмерном пространстве.
10. — Тороидальная система координат
Тороидальная система координат используется для описания объектов и явлений, которые имеют форму тора или донутса. В этой системе координат есть две независимые переменные: радиус и угол.
Радиус (ρ) измеряет расстояние от центра тора до точки в его плоскости. Он может быть положительным или отрицательным. Положительные значения радиуса соответствуют точкам, находящимся на внешнем крае тора, а отрицательные значения — на внутреннем крае.
Угол (φ) измеряет положение точки на плоскости тора относительно его оси симметрии. Обычно угол измеряется в радианах от 0 до 2π или от -π до π. Угол 0 соответствует точке, находящейся на оси симметрии, а положительные значения угла — точкам, расположенным против часовой стрелки относительно этой оси.
В тороидальной системе координат любая точка на торе может быть однозначно определена с помощью радиуса и угла. Эта система координат широко используется в физике, особенно в теории поля и квантовой механике, для описания свойств частиц и физических полей.
Одним из примеров применения тороидальной системы координат является описание магнитного поля вокруг тороидальных обмоток. В этом случае радиус и угол соответствуют точке в пространстве, где измеряется магнитное поле.
💥 Видео
Определение координаты движущегося тела | Физика 9 класс #3 | ИнфоурокСкачать

ФИЗИКА 10 класс : Механическое движение | Материальная точка, траектория, перемещение.Скачать

Система координат. Система отсчетаСкачать

Урок 7. Механическое движение. Основные определения кинематики.Скачать

Системы координат в геодезииСкачать

Местные системы координат. Вебинар #15Скачать
Видеоурок по физике "Механическое движение. Системы отсчёта"Скачать

06 Геочайник - Системы координат в РФСкачать

Прямоугольная система координат в пространстве. 11 класс.Скачать

Реакция на результаты ЕГЭ 2022 по русскому языкуСкачать

Механическое движение и его характеристики. 7 класс.Скачать

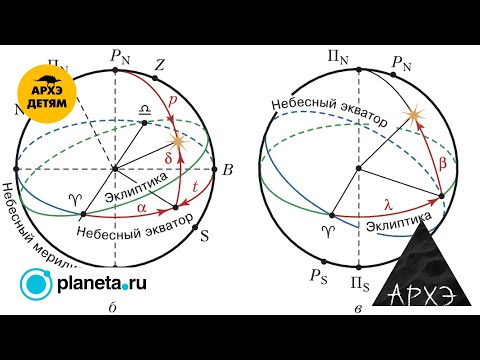
Астрономия. Системы координат: I и II экваториальные и эклиптическая системы координатСкачать

Системы координат в геодезии. Зональная система прямоугольных координат. Гаусса-КрюгераСкачать

11 класс, 1 урок, Прямоугольная система координат в пространствеСкачать

Преобразования # 10: произвольные системы координатСкачать
Материальная точка. Система отсчета | Физика 9 класс #1 | ИнфоурокСкачать

Полярная система координатСкачать
